
技術(shù)文章
Technical articles 熱門搜索:
P760/01_2760nm單模垂直腔面發(fā)射激光器
VCSEL-20-M激光控制驅(qū)動器
ZNSP25.4-1IR拋光硫化鋅(ZnS)多光譜(透明)窗片 0.37-13.5um 25.4X1.0mm(晶體/棱鏡
HB-C0BFAS0832x4 QPSK C波段相干混頻器(信號解調(diào)/鎖相放大器等)
Frequad-W-CW DUV 單頻連續(xù)激光器 213nm 10mW Frequad-W
ER40-6/125截止波長1300nm 高摻雜EDF摻鉺光纖
SNA-4-FC-UPC日本精工法蘭FC/UPC(連接器/光纖束/光纜)
GD5210Y-2-2-TO46905nm 硅雪崩光電二極管 400-1100nm
WISTSense Point 緊湊型高精度光纖傳感器解調(diào)儀(信號解調(diào)/鎖相放大器等)
CO2激光光譜分析儀
1030nm超短脈沖種子激光器PS-PSL-1030
FLEX-BF裸光纖研磨機
NANOFIBER-400-9-SA干涉型單模微納光纖傳感器 1270-2000nm
350-2000nm 1倍紅外觀察鏡
高能激光光譜光束組合的光柵 (色散勻化片)
S+C+L波段 160nm可調(diào)諧帶通濾波器
熱門搜索:
P760/01_2760nm單模垂直腔面發(fā)射激光器
VCSEL-20-M激光控制驅(qū)動器
ZNSP25.4-1IR拋光硫化鋅(ZnS)多光譜(透明)窗片 0.37-13.5um 25.4X1.0mm(晶體/棱鏡
HB-C0BFAS0832x4 QPSK C波段相干混頻器(信號解調(diào)/鎖相放大器等)
Frequad-W-CW DUV 單頻連續(xù)激光器 213nm 10mW Frequad-W
ER40-6/125截止波長1300nm 高摻雜EDF摻鉺光纖
SNA-4-FC-UPC日本精工法蘭FC/UPC(連接器/光纖束/光纜)
GD5210Y-2-2-TO46905nm 硅雪崩光電二極管 400-1100nm
WISTSense Point 緊湊型高精度光纖傳感器解調(diào)儀(信號解調(diào)/鎖相放大器等)
CO2激光光譜分析儀
1030nm超短脈沖種子激光器PS-PSL-1030
FLEX-BF裸光纖研磨機
NANOFIBER-400-9-SA干涉型單模微納光纖傳感器 1270-2000nm
350-2000nm 1倍紅外觀察鏡
高能激光光譜光束組合的光柵 (色散勻化片)
S+C+L波段 160nm可調(diào)諧帶通濾波器
 更新時間:2025-12-05
更新時間:2025-12-05 點擊次數(shù):62
點擊次數(shù):62
一、研究背景
智能材料作為未來科技的關(guān)鍵組成部分,在許多領(lǐng)域中展現(xiàn)了巨大的應(yīng)用潛力。然而,傳統(tǒng)的磁響應(yīng)材料通常受到固定磁各向異性和單一響應(yīng)模式的限制,難以滿足復(fù)雜環(huán)境和多功能任務(wù)的需求。例如,在醫(yī)療手術(shù)中,微型軟體機器人需要在狹窄空間中變形以適應(yīng)復(fù)雜的解剖結(jié)構(gòu),同時還需承擔(dān)精準(zhǔn)遞送藥物等多種功能。現(xiàn)有磁響應(yīng)材料的局限性使得這些需求難以全面實現(xiàn),因此開發(fā)具有可編程性和多響應(yīng)能力的新型磁性材料成為研究熱點。此外,如何通過簡單、高效的技術(shù)在不破壞材料整體結(jié)構(gòu)的情況下,實現(xiàn)多次重復(fù)編程,仍是當(dāng)前智能材料研究中面臨的重大挑戰(zhàn)。以醫(yī)療手術(shù)為例,微創(chuàng)軟體機器人要求材料在狹小空間中進行實時變形,而現(xiàn)有材料無法提供快速的響應(yīng)速度和高精度的形狀控制能力。因此,亟需一種能夠?qū)崿F(xiàn)多功能響應(yīng)與編程的材料系統(tǒng),以滿足復(fù)雜應(yīng)用場景的需求。
二、創(chuàng)新研究
中國科學(xué)技術(shù)大學(xué)微納米工程實驗室李家文副教授課題組提出了一種基于磁疇可重編碼的形狀記憶復(fù)合材料(RM-SMC)的磁性機器人系統(tǒng),通過激光與磁場的協(xié)同作用,解決了傳統(tǒng)磁性軟機器人變形能力受限、承載能力較弱的問題。課題組通過結(jié)合形狀記憶聚合物的可變剛度與磁性微囊的可重編碼特性,設(shè)計了一種新型磁性機器人。該機器人能夠在磁場和激光的共同作用下,進行磁疇圖案化重編碼,實現(xiàn)形態(tài)可重構(gòu)和剛度可調(diào),進而突破了現(xiàn)有磁性軟機器人在形態(tài)改變和負載能力方面的瓶頸。
如圖1所示,研究過程中使用近紅外激光精確調(diào)控RM-SMC薄膜內(nèi)部的磁性微囊,通過激光加熱至微囊的相變溫度,激活材料內(nèi)部的磁性顆粒并使其在外部磁場的引導(dǎo)下重新排列,從而實現(xiàn)磁疇重編碼。這一過程確保了即使撤去外部磁場,材料的磁疇編碼仍能保持穩(wěn)定,從而保證機器人在不同的磁場作用下能夠?qū)崿F(xiàn)預(yù)設(shè)的變形。此外,RM-SMC材料的形狀記憶特性使得機器人能夠在加熱軟化后發(fā)生復(fù)雜的三維變形,并在冷卻后鎖定其形狀,從而具備形態(tài)保持能力。
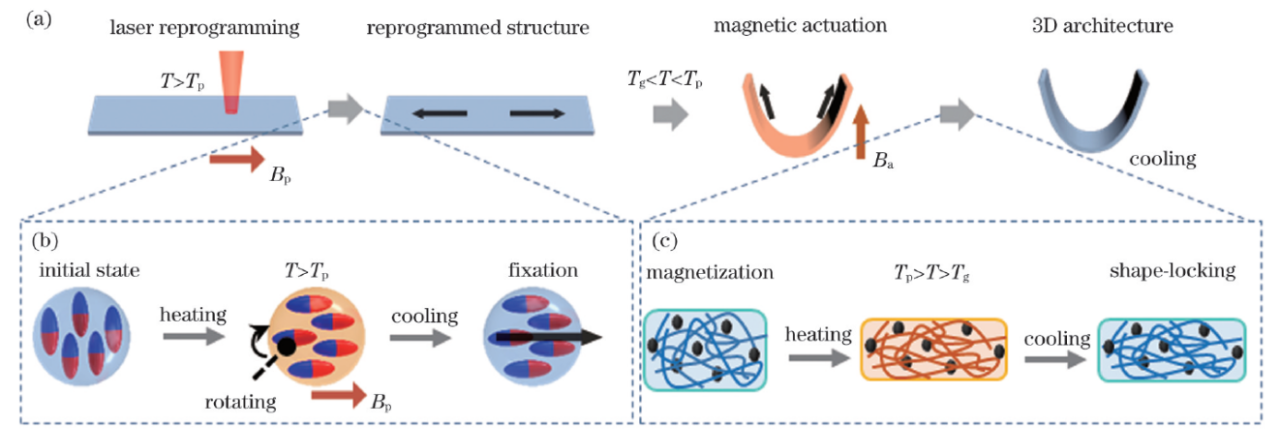
圖1 RM-SMC機器人磁疇重編碼及變形原理。(a)RM-SMC機器人重編碼、加熱變軟、磁致變形和形狀保持過程;(b)磁性微囊中磁性顆粒偏轉(zhuǎn)示意圖;(c)機器人基質(zhì)變形、形狀鎖定示意圖。Bp:旋轉(zhuǎn)磁場;Ba:旋轉(zhuǎn)磁場
通過精細編碼的磁疇方向控制,機器人能夠在磁場作用下完成多種形態(tài)轉(zhuǎn)換。如圖2所示,在二維長條結(jié)構(gòu)的基礎(chǔ)上,激光加熱使得結(jié)構(gòu)能夠轉(zhuǎn)變?yōu)閳A筒形,并在旋轉(zhuǎn)磁場的驅(qū)動下沿水平方向自由滾動。進一步的實驗表明,機器人能夠在不同地形上運動,如在紙面上滾動、攀爬斜坡、跨越狹縫等,還能在變化的磁場下保持穩(wěn)定的形態(tài)。此外,如圖3所示,機器人具備優(yōu)異的負載能力,能夠承載比自身重143倍的物體,完成貨物搬運等復(fù)雜任務(wù)。
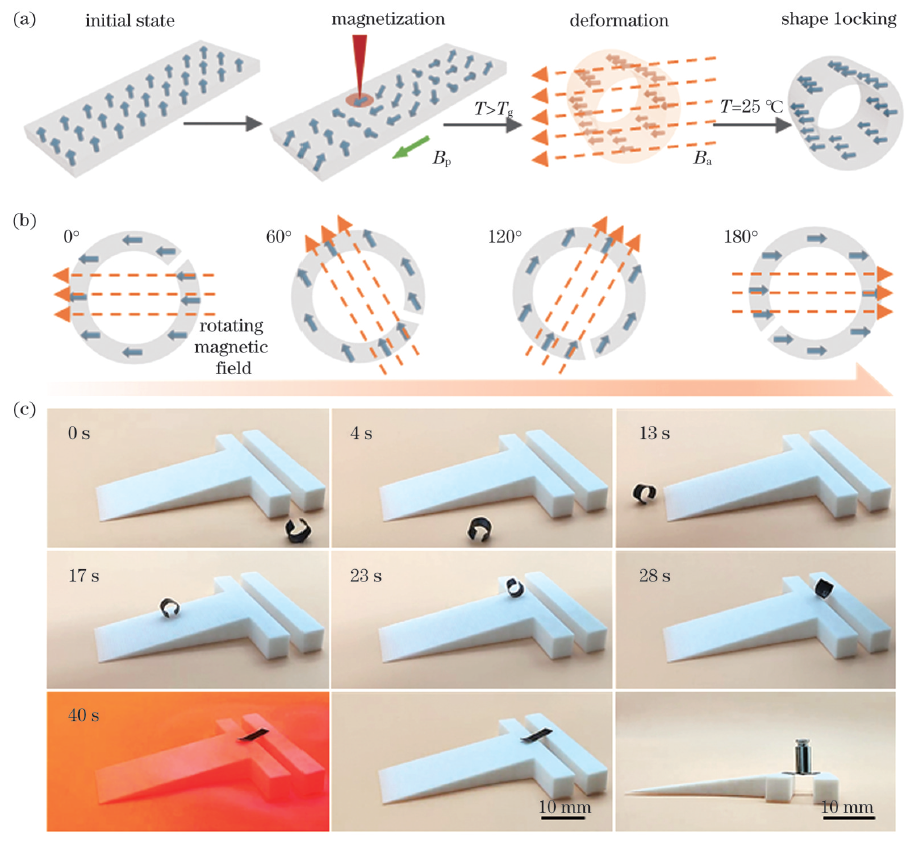
圖2 滾動機器人。(a)滾動機器人的編碼、變形、形狀鎖定過程;(b)機器人在旋轉(zhuǎn)磁場下滾動過程;(c)機器人在不同地形運動以及變形后承載過程
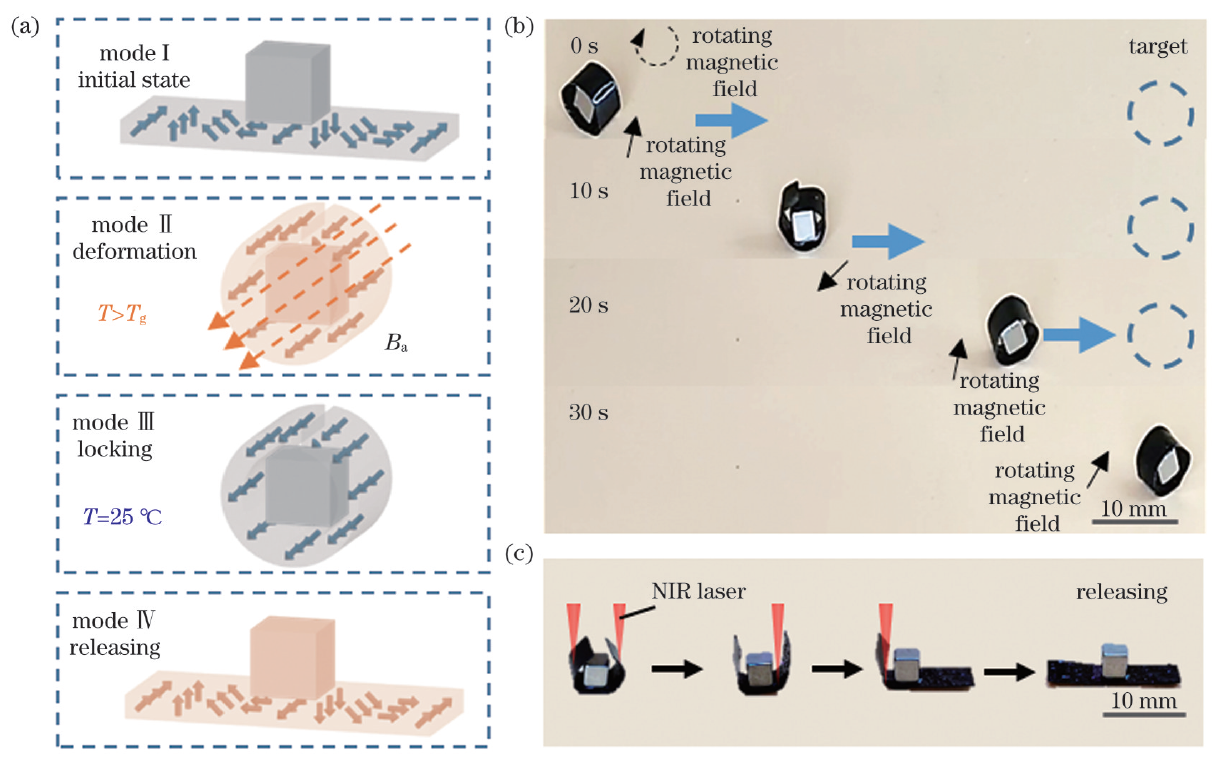
圖3 載物機器人。(a)載物機器人的貨物放置、磁驅(qū)變形、貨物鎖定和貨物釋放過程;(b)載物機器人在旋轉(zhuǎn)磁場下的定向運輸過程;(c)載物機器人貨物的釋放過程
同時,在RM-SMC長條變形時、通過改變外部磁場的方向,可以得到螺旋形狀的機器人,可在旋轉(zhuǎn)磁場驅(qū)動下螺旋前進。如圖4所示,將RM-SMC螺旋機器人放置在裝滿水的液槽中進行驅(qū)動,在10 Hz的旋轉(zhuǎn)磁場的驅(qū)動下,機器人的運動速度可達8.33 mm/s。
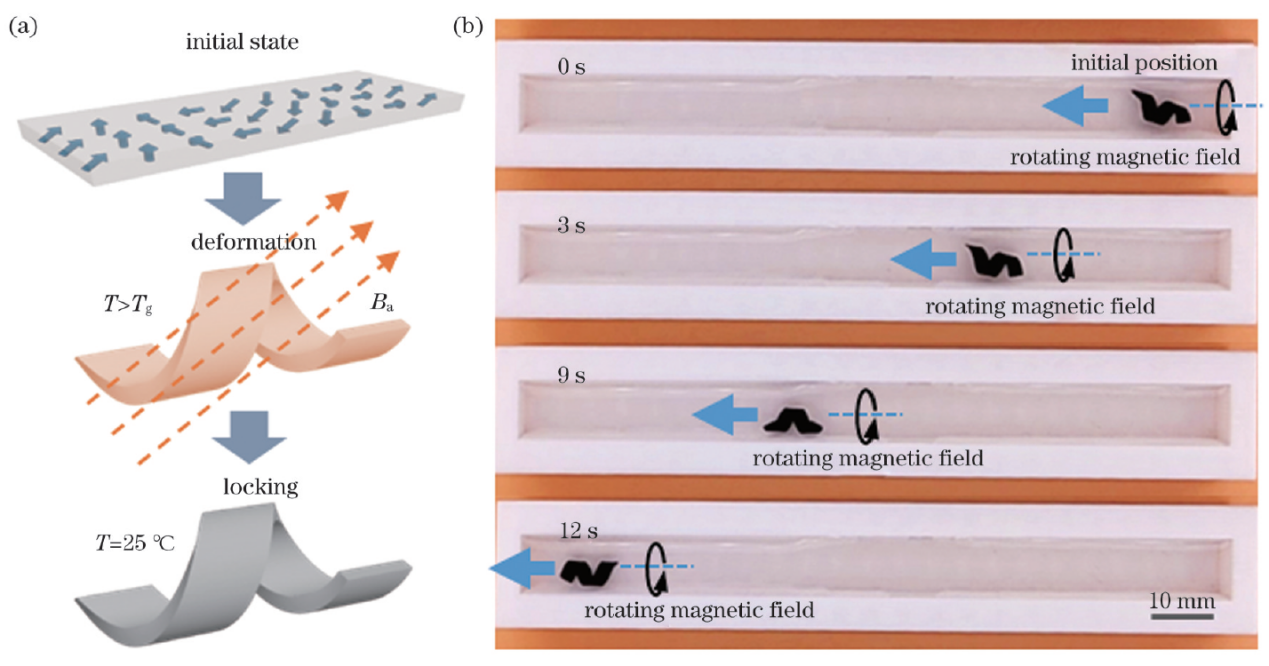
圖4 螺旋機器人。(a)螺旋機器人的加熱磁致變形和形狀鎖定過程;(b)螺旋機器人在旋轉(zhuǎn)磁場下在水中驅(qū)動過程
三、總結(jié)
課題組實現(xiàn)了磁性材料在激光和磁場雙重作用下的精確磁疇重編碼與形態(tài)變形,不僅解決了現(xiàn)有磁性軟機器人形變后無法保持形狀的問題,還通過調(diào)節(jié)材料剛度,擴展了機器人在不同環(huán)境下的適用性。通過采用這種方法,機器人能夠在多種復(fù)雜環(huán)境中實現(xiàn)自主運動、形態(tài)變換與任務(wù)執(zhí)行,具備廣泛的應(yīng)用潛力。這項工作為軟機器人領(lǐng)域提供了一種新的設(shè)計思路,不僅能顯著提高機器人的形態(tài)變換能力和承載能力,還為未來生物醫(yī)學(xué)、微納操作、貨物運輸?shù)阮I(lǐng)域的應(yīng)用奠定了基礎(chǔ)。通過進一步優(yōu)化材料與工藝,該研究有望推動更多高性能自適應(yīng)機器人系統(tǒng)的開發(fā),并為智能機器人在復(fù)雜、動態(tài)環(huán)境中的廣泛應(yīng)用提供技術(shù)支持。
參考文獻: 中國光學(xué)期刊網(wǎng)
您好,可以免費咨詢技術(shù)客服[Daisy]
筱曉(上海)光子技術(shù)有限公司
歡迎大家給我們留言,私信我們會詳細解答,分享產(chǎn)品鏈接給您。
免責(zé)聲明:
資訊內(nèi)容來源于互聯(lián)網(wǎng),不代表本網(wǎng)站及新媒體平臺贊同其觀點和對其真實性負責(zé)。如對文、圖等版權(quán)問題存在異議的,請聯(lián)系我們將協(xié)調(diào)給予刪除處理。行業(yè)資訊僅供參考,不存在競爭的經(jīng)濟利益。
 當(dāng)前位置:
當(dāng)前位置:
